Amûra pîvandina çalak a otomatîk
Serlêdana Berhemê
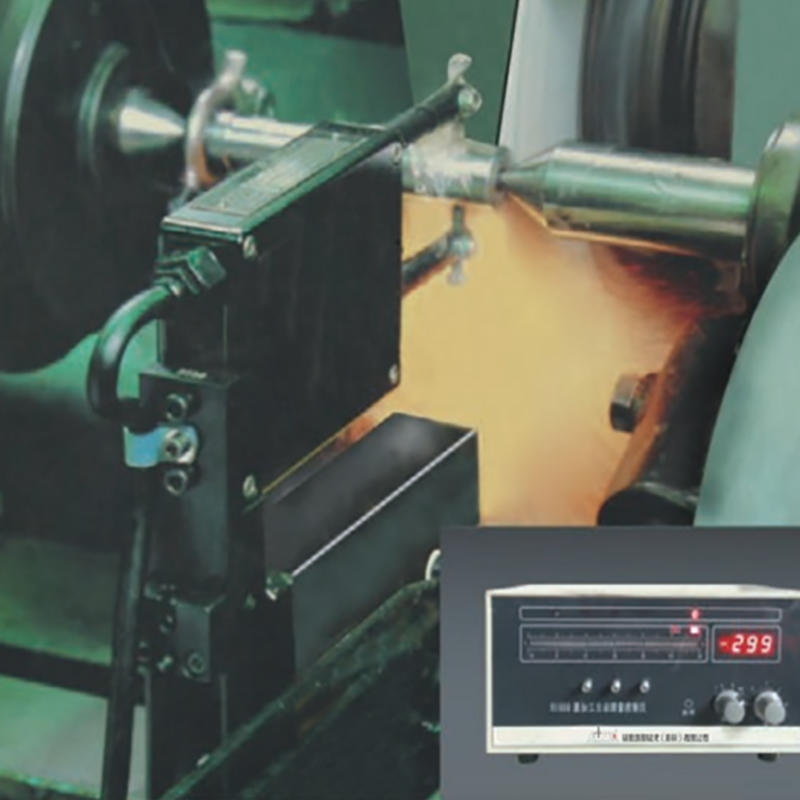
Kontrola pêşbînîkirî ya pergala nerm a ku ji bo kontrola pêşbînîkirî tê sepandin, ew e ku pîvandin û pîvandina pêvajoyê di pêvajoyê de bi hev re bike da ku pergalek pîvandinê ya xeleka girtî ava bike da ku rewşa pêvajoyê ya makîneyê kontrol bike û piştrast bike ku pergala kontrolê ya bermayiyên pêvajoyê tune. Kontrola nerm a makîneyek dikare bi kontrolkerek di pergalek xeleka girtî ya herî kêm de ku dikare pîvandina pêvajoyê û piştî pêvajoyê bike, were bidestxistin. Amûra pîvandinê bi komputerê re, danûstendina bêtir bi makîneya jorîn û makîneya jêrîn re, dikare rêveberiya yekgirtî ya giştî ya xeta otomatîk pêk bîne. Ji ber vê yekê hûn dikarin xêzek hilberîna otomatîk a pir bikêrhatî bêyî pêvajoya bermayiyan ava bikin. Wekî din, cûrbecûr senzor, ku bi tiştên derveyî yên cûda re têkildar in ji bo tespîtkirinê, dikarin piştrast bikin ku tevahiya pergalê ji hêla derveyî ve nayê bandor kirin.
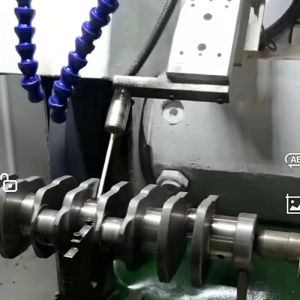
Pêvajoya pîvandina çalak Di dema pêvajoyê de, amûra pîvandinê di her kêliyê de perçeya kar dipîve û encamên pîvandinê dixe nav kontrolkerê. Li xala sînyala pêşwextkirî, kontrolker sînyalek dişîne da ku xebitandina makîneyê kontrol bike. Mînakî, di pêvajoya hûrkirinê de, xwarina hûrkirina qalind, dema ku xala sînyala mezinahiya yekem, kontrolker sînyalê dide, makîne ji hûrkirina qalind diguhere hûrkirina nazik, dema ku xala sînyala mezinahiya duyemîn, makîne ji xwarina hûrkirina nazik diguhere hûrkirina sivik (hûrkirina bê şewq), dema ku xala sînyala sêyemîn, perçeya kar digihîje mezinahiya pêşwextkirî, çerxa hûrkirinê zû vedigere, û dikeve rewşa standby ya çerxa din.
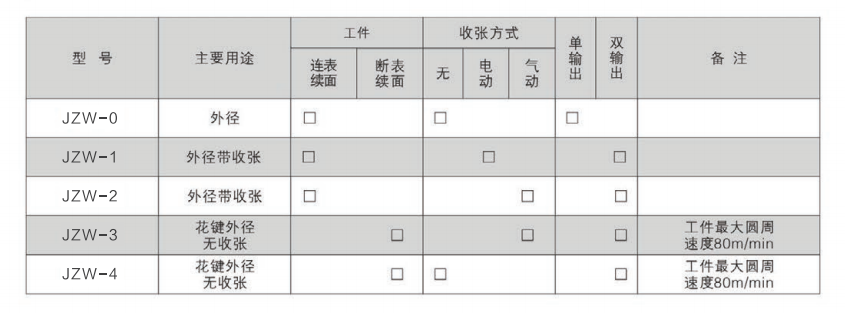
Parametreya Berhemê
Vîdyoya hilberê

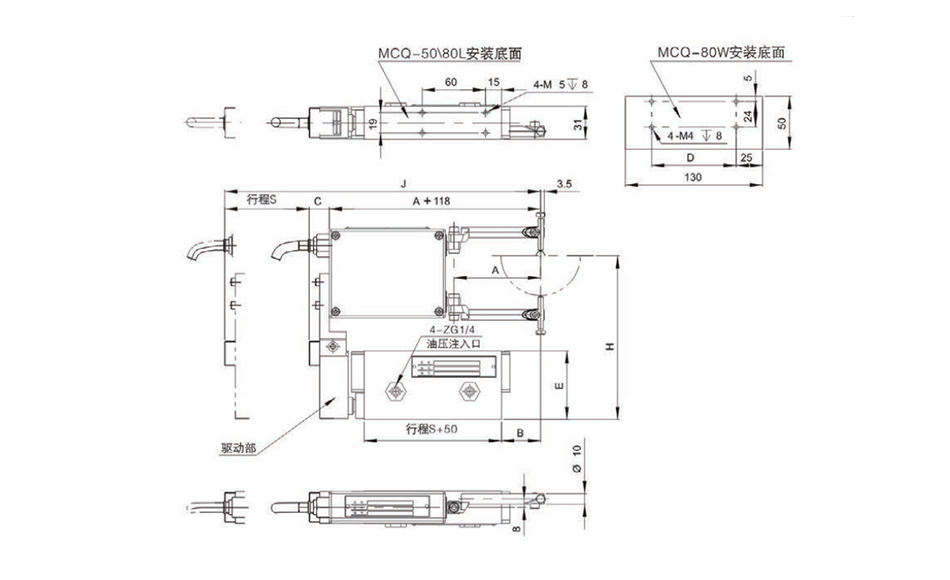
Mezinahiya Berhemê